编者按
作为国家级实验教学示范中心
国家级众创空间
国家级创新创业学院建设参与单位
山东大学工程训练中心廿余载
深耕实践实训、创新创业领域
培养了大批创新人才
KAPIV一体化实践育人项目
作为教学改革的核心项目
通过引入“新形态课程”等
新工科教改理念
将知识、能力、实践、创新、品行
有机融合
实现了育人模式的深度革新
学生们置身其中
不断学习知识
锤炼能力
提升素养
项目相关成果连续斩获
国家级教学成果一、二等奖
接下来让我们跟随
“工创之星”系列报道
一同走进山大KAPIV实践育人项目
探寻学在山大、快乐成长的奥秘!
团队成员与分工
项目团队由机械工程学院23级机电2班6位同学组成。组长陈凯航主要负责机械臂模型设计,整车模型修改优化,整车装配以及最终答辩;张冠杰主要负责二维图纸的绘制和电控部分代码的编写;章洋彬主要负责部分零件加工,PPT和视频的制作;邓文志主要负责部分零件的加工,报告撰写以及工作原理仿真;袁晨涛主要负责物流车底板的模型设计和部分零件加工;唐仕豪主要负责报告的撰写,和整车零件的装配。
团队成员说:
Kapiv项目经历将书本知识具象化,让我们对实际产品生产过程有了更深刻的认识,助力我们在学习中更好地学以致用。
项目背景与初心
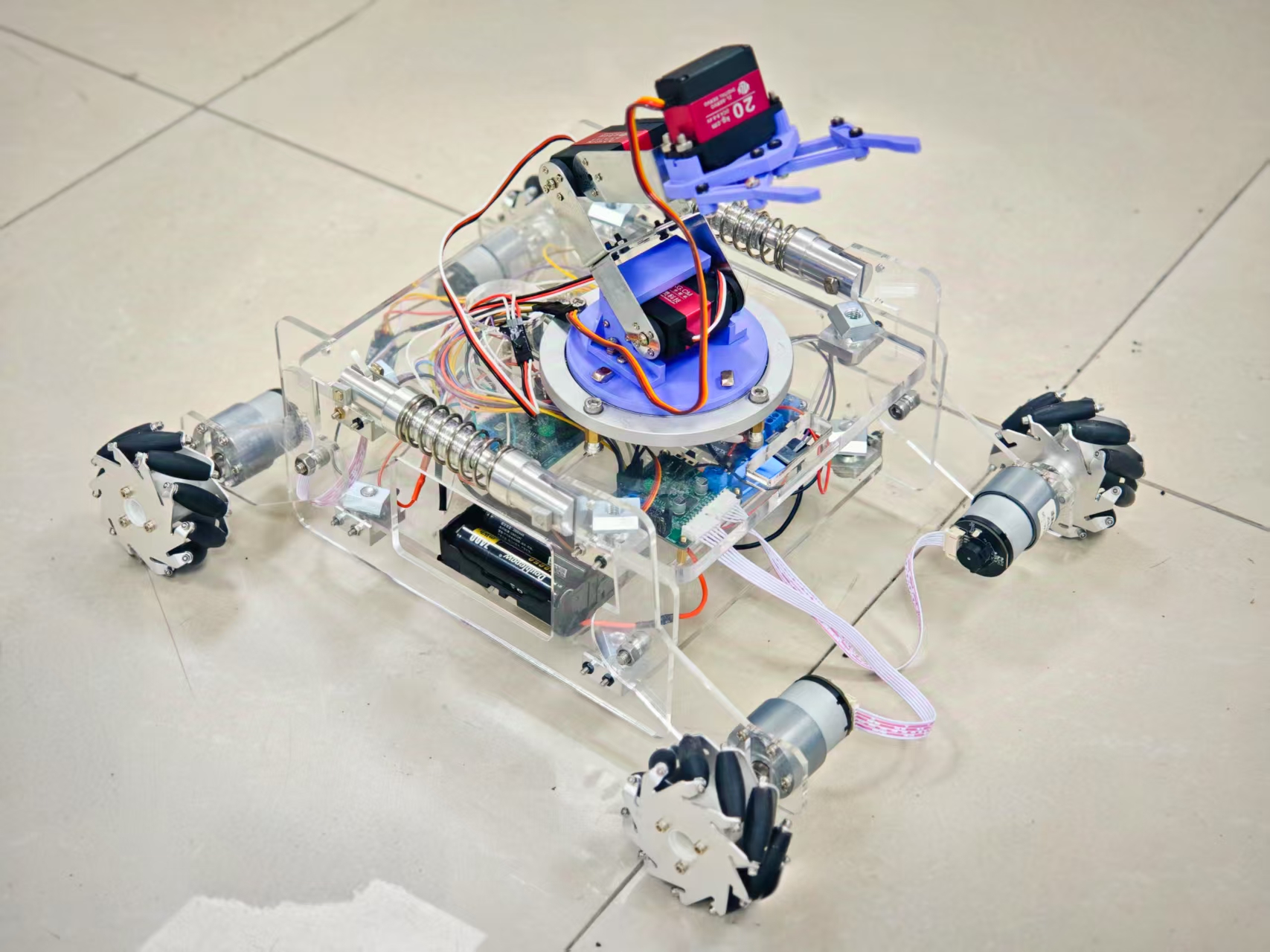
我们选择物流搬运机器人项目,主要是基于对物流行业痛点的关注,也源于专业学习与全国大学生工程训练综合能力大赛的契机。在中小型物流场景中,传统AGV设备存在地形适应力弱、抓取成本高等问题,而农村仓储、乡镇快递站等场景对低成本自动化设备需求迫切。
我们的项目目标是打造兼具高性能与经济性的智能物流车解决方案,通过“麦氏轮全向底盘”“多自由度舵机夹爪”与“低成本遥控技术”的融合,解决传统设备在复杂地形适应性差、抓取机构成本高昂等问题,希望能为物流车市场提供我们优化的方案。
课堂知识的实践迁移:从原理到应用的闭环
在底盘结构设计中,鉴于上下底盘需承受差异化载荷,我们依据《材料力学》中的强度理论,对底盘支撑结构进行了力学建模与强度校核分析,通过计算应力分布和变形量确保结构承载能力满足设计要求。而在抓夹设计环节,我们参考《机械原理》中连杆机构的运动学原理,对抓夹的连杆结构进行优化设计,使抓夹能够通过连杆机构的精确传动实现物体的精准抓取与稳定夹持。
导师指导:从技术攻坚到方案优化
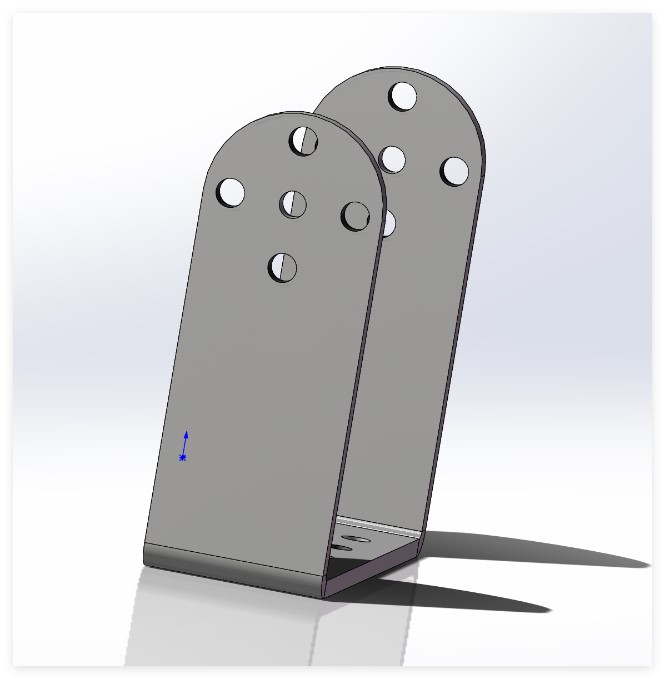
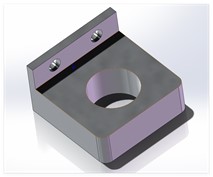
在整个项目过程中,工训尚勇老师、张庆老师和李东辕老师从结构设计到装配加工都给予了我们队伍悉心指导:在连接部分的结构设计环节,老师鉴于轴承装配对加工精度要求极高,而现阶段项目加工精度难以满足这一需求,建议我们舍弃繁琐的轴承配合方式,采用简单方便的螺栓螺母连接,极大地提高了装配效率;在加工装配方面,考虑到舵机支撑板需要进行90度折弯,老师指出铝合金材料折弯后可能难以保持强度且容易折断,而镀锌板能在折弯后依然保持良好的强度特性、不易折断,故建议我们采用镀锌板作为舵机支架的材料。



技术突破:从理论验证到创新实践
在创新减震系统的设计中,我们先通过SolidWorks进行仿真分析,实现了对减震过程的模拟。但在实际加工装配阶段,系统暴露出两项问题:一是支撑板因螺栓装配存在卡死现象;二是减震系统摩擦力过大,影响了减震效果。
针对上述问题,我们开展了针对性优化。对于支撑板卡死问题,经理论强度计算与距离模拟仿真验证后,将电机支撑板宽度缩减至原尺寸的60%;针对摩擦力过大问题,采取适当扩大孔径的解决方案——尽管其精度不及轴承配合,但显著降低了模型修改与加工成本;同时为避免材料浪费,我们对原有零件进行二次激光切割加工以获取新零件。经过一番的优化调整,减震系统最终实现成功装配。

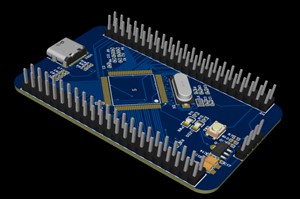
在电控系统设计中,我们选用STM32F4系列芯片作为主控核心。该芯片不仅能满足基础数据处理需求,更具备良好的功能拓展性,考虑到市售开发板存在体积偏大、外设冗余的问题——开发板中的诸多功能与本KAPIV项目无关,我们决定自主设计主控核心板。
设计过程中,我们剔除不必要的学习类外设,仅保留并引出与PWM输出、串口通信、SWD烧录等核心功能相关的引脚,其余引脚则预留作拓展接口,方案确立后自主绘制PCB板并制作,最终得到一款体积小巧且适配物流车功能的核心板。

软件层面,通过自主编写程序实现三大核心功能:接收蓝牙遥控信号、驱动舵机动作、控制电机运行,以此保障物流车的移动与抓取操作。

困难与挑战
在加工过程中我们遇到了现有加工材料与设计不匹配,已加工的零件装配误差,装配时零件强度不够等问题。
材料匹配:底板连接件的设计调整
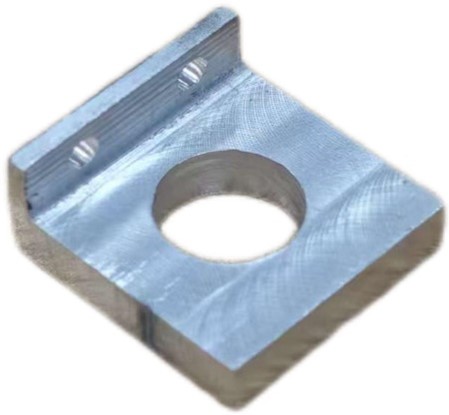
在加工14mm厚的侧板底板连接件时,我们携带设计图纸前往加工,却发现工训中心并无14mm厚的铝合金板。面对现有加工材料与设计不匹配的问题,我们迅速修改方案,通过仿真分析与强度计算,将连接件厚度改为10mm,并利用工训中心现有材料铣削加工,最终成功解决了材料与设计的矛盾。
螺纹装配:内外连接杆的牙形修正
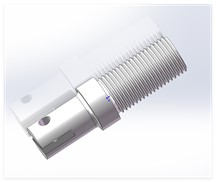
加工内外连接杆时,我们采用数控车床车削出18mm螺纹后,发现标准螺母无法拧入,在排除直径与螺距不匹配的因素后,确定问题根源为螺纹牙形不规整。经小组商议,我们购置对应板牙进行牙形修正,通过板牙套在螺纹上旋转切削的方式修整牙形,最终实现了螺母与螺纹的顺利连接,解决了装配误差的问题。

零件强度电机支撑板的迭代
第一代电机支撑板采用4mm厚亚克力板,安装后因需承受整车载荷出现弯曲,暴露出零件强度不足的问题,针对这个问题,我们立即启动设计迭代,将材料更换为2mm厚镀锌板,通过材料特性优化显著提升抗弯强度,避免了支撑板折弯现象,完成了零件性能的升级优化。


能力成长与收获
通过此次实训项目,我们在各类能力成长方面收获颇丰。一方面,我们了解了激光切割、数控车、3d打印等加工方法的优势和特点,并且随着我们动手加工我们自己的零件,我们对各个加工方法的实践和操作细节也有了更深的认识;另一方面,我们对模型设计有了更深的体会,模型设计不仅仅是根据设计者的经验建立模型,更需要在设计时考虑选用材料、加工方式、装配误差以及产品成本等各种问题。同时通过我们自己编写物流车的代码,用蓝牙模块建立核心板与手机的通讯,接收信号后驱动舵机和电机转动,成功让物流车实现抓取目标的功能。

在收获了专业知识和实践能力的同时,我们也深刻体会到了团队合作的重要性,通过团队成员的协同协作,不仅能催生出新颖的创意构想,还能形成更高效的问题解决方案。以加工环节为例,往往需要多人各司其职、密切配合,在分工与协作中推动任务的顺利开展;同时我们也认识到创新的重要性,在创新实践中,既要考量成本投入与实现难度等现实因素,又要兼顾创新成果的实际应用价值,让创新真正服务于目标达成,而非停留在理论层面的空想。

未来展望
参与KAPIV项目的经历让我们对未来的专业学习更加期待。作为大学生,我们会带着这份收获继续在专业领域深耕,有效发挥学校实验室资源优势,尝试参与更多科创比赛。当遇到技术难题时,项目中所磨炼出的探索精神和创新意识将成为我们披荆斩棘的利刃,我们会在团队协作中积极踊跃地提出创新想法,与伙伴们携手并肩、集思广益,共同攻克难关。与此同时,我们也会把创新思维深度融入日常学习,让创新成为一种习惯。展望未来,无论是学术研究还是职业道路,我们都将以扎实的专业知识、出色的实践能力和坚定的信心无畏前行,迎接每一个挑战,绘就精彩青春画卷!